Leo Frankowski
Leo Frankowski (1943年2月13日 – 2008年12月25日)は、アメリカのSF小説小説家です。
フランコフスキーはミシガン州デトロイトで[1] ポーランドの家系の両親のもとに生まれました。彼の執筆キャリアの前に、彼は成功したエンジニアでした。彼はミシガン州ウティカにあるSterling Manufacturing and Designを所有、運営していました。そこでは、とりわけクライスラー用の空気圧および油圧システムを設計していました。 Leoは、彼の最も人気のある製品であるFormital、プラスチック自動車ボディフィラーのベースとして使用するための刻印付きアルミニウム製品など、複数の特許を保有していました。 Formitalは長年にわたり、自動車部品店のPep Boysチェーンによって独占的に運ばれてきました。
フランコフスキーは妻と共に4年間ロシアに住んでいて、10代の娘を養子にしました、しかし彼の死の時に、彼は彼らから離れて、そしてアメリカに戻りました。彼はカリフォルニア州エルシノア湖で亡くなりました。 編集]
彼は数年前に短編小説に夢中になっていましたが、1980年代初頭に本格的に脚光を浴びました。彼は、Guy Snyderによって設立され、現在は現存していないデトロイト地区のNational Science Fiction Writer's Exchangeとなり、そのメンバーには、Lloyd Biggle、Ted Reynolds、そして将来出版されるAnn Tonsor Zeddiesが含まれました。会員は原稿を声に出して読んだ後、批評されました。最初から、レオのタイムトラベル関連の話は会員から好評でした。これらの会議のほとんどはオーディオテープで行われ、それらのテープはSnyderによって保持されていました。
肯定的な反応に励まされて、レオはすぐに最初のと題された彼の最初の小説を書いた。その本はDel Rey Booksに上陸し、出版社は彼に複数本の契約を申し出ました。 Retitled The Cross Time Engineer は、コンラッド・スターガードシリーズの最初の本となり、ポーランドの経歴が特に明白になりました。
他の2つのシリーズは、Dave Grossmanと共同で部分的に書かれました。一人で、彼はまた独立小説 Fata Morgana と Copernick's Rebellion を書いた。
Frankowskiの最新作は再びConrad Stargardを特集しました。彼は彼の当時の出版社ベーンが「悪い執筆」を理由に拒絶したロジャー・オルセンと共同でコンラッド卿の十字軍を書いた(フランクフスキーは疑った)。 Baenはまた、他の次期タイトルの契約も打ち切りました。フランクフスキーはその小説を出版し[3] 、そのシリーズを締めくくるもう一つのスターガードの本を約束した[4] 彼の死は明らかにこの巻の完成を妨げた[2]
edit フランコフスキーは、彼のファンの大部分は「軍事的および技術的背景を持つ男性」であり、彼の中傷者は「主にフェミニスト、リベラル、同性愛者」であると述べている[5] 彼の小説を楽しむことはまずないだろう。 [5]
1990年コンラッド卿の女性の序文の中で、フランコフスキーは「この作品で気づかれた明白な性差別と男性の悪魔主義は完全にビル・ギルモアのせいであり、すべての苦情は対処されるべきです」ミシガン州アナーバーのDawn Treader Bookshopで彼に。」
参考文献編集]
コンラッドスターガードシリーズ [編集]
コンラッドスターガードシリーズ、20世紀のポーランド人エンジニアは13世紀のポーランドに時間をさかのぼって移動し、そこで彼は現代の技術を導入し、ポーランドの歴史的な敵を敗北させそして全滅させる何世紀にもわたっての支配的なヨーロッパの権力になります。それは以下の本で構成されています。 Rubber と Time Machine は同じ設定と同じ文字をいくつか備えていますが、それらは「メインシーケンス」の本ではありません。
クロスタイムエンジニア(1986)
20世紀のポーランド人エンジニア、コンラッド・シュワルツは、13世紀のポーランドに偶然と不思議なことに投げ捨てられました。彼は、彼が確かに初期の時代にいたと確信している聖イグナシーの父イグナシーと親しくなります。船長のTadaosのような後の本に登場する多数の未成年のキャラクターと出会い、ポーランドの大部分を統治する公爵の親戚であるCount Lambertのために働くことになりました。
ハイテクナイト (1989)
コンラッドは、現在はスターガードという名前を使用しているが、彼の正しい名前はドイツ語にも聞こえるので、1241モンゴルの侵略の差し迫った脅威に対処するためにポーランドを先進技術に取り入れようとしている
。 ](1989)
コンラッドは15万人の高度訓練を受けた兵士の軍隊を創設した。
The Flying Warlord (1989)
ランバート伯爵は、コンラッドに彼の努力を空軍の創設に転用させるよう命じた。モンゴル人が侵略し、四万人が死亡した
Lord Conrad's Lady (1990)
Lady Francineは、ポーランドで2人の最も美しい女性の一人として知られています。コンラッド、しかし異端者としてのイスラム教徒は彼と結婚することができないか、または結婚しないであろう。
コンラッドのゴム探求(1998):コンラッドは南アメリカに探検隊を派遣する。
コンラッドのタイムマシーン(2002)
コンラッドはこれには登場しません。この本はタイムマシンの発明とその使用を制御する人々を説明し、偶然にもコンラッドのために彼らの時折の干渉についての説明を提供している
(19459017)(2005)
バーの反対側から奴隷貿易を見ています。
コンラッドの最後のキャンペーン(2014)
フランクフスキの死後公開されたコンラッドスターガードシリーズのフィナーレ。
このシリーズの2つのオムニバス版がBaen Booksによって出版されています。
コンラッドスターガード(2004)クロスタイムエンジニア、ハイテクナイト、ラディアントウォリアー
フライングウォーロード、 、コンラッドのラバークエスト
ニューカシュビア Two-Space [ edit
このシリーズは、GrossmanとBob Hudsonの協力のもと、 The Guns of Two-Space (2007)によって続けられました)
独立小説 ]
編集]
外部リンク[4] 編集 ]]
1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.21.22.23.24.25.26.27.28.29.30.31.32.33.34.35.36.37.38.39.40.41.42.43.44.45.46 .47.48.49.50.51.52.53.54.55.56.57.58.59.60.61.62.63.64.65.66.67.68.69.70.71.72.73 .74.75.76.77.78.79.80.81.82.83.84.85.86.87.88.89.90.91.92.93.94.95.96.97.98.99.100.101.102.103.104.105.106.107.108.109.110.111.112.113.114.115.116.117.118.119.120.121.122.123.124.125.126.127.128.129.130.131 .132.133.134.135.136.137.138.139.140.141.142.143.144.145.146.147.148.149.150.151.152.153.154. 155.156.157.158.159.160.161.162.163.164.
ビュイックV6
ビュイックV6 、一般に3800と呼ばれ、元々は198立方インチ(3.2 L)で、当初はFireballとして販売されていた。 1962年に発売されたは、ゼネラルモーターズが使用した大型V6エンジンでした。このブロックは鋳鉄製で、すべてプッシュロッドで作動する2バルブ1気筒のアイロンヘッドを使用しています。エンジンはもともとは米国で設計、製造されていましたが、オーストラリアでは後期バージョンでも製造されました。
3800は、ワードの10年ベスト20エンジンリストに数回掲載され、ワードの年間ベスト10リストを複数回作成し、史上最も生産されたエンジンの1つです。今日までに、2500万以上が生産されています。
1967年、GMはそのデザインをカイザージープに売却した。マッスルカーの時代は定着していました、そしてGMはもはや北米でその時点で変わったエンジン構成であると考えられたV6を生産する必要性を感じませんでした。 10年後のエネルギー危機は、その時点でKaiser-Jeepを購入したAmerican Motors(AMC)からデザインを買い戻すように会社に促しました、そしてそれが開発されたので初期の231の子孫は最も一般的なGM V6であり続けます非常に耐久性と信頼性の高いデザインになります。
3800以前の後輪駆動(RWD)V6はビュイック、オールズモビル、ポンティアック(BOP)のベルハウジングパターンを使用していますが、前輪駆動(FWD)とRWD 3800 V6の奇妙な点は異なります。 90°V6の場合、GM 60°V6のベルハウジング(Metric Pattern)を使用します。 FWD用途に使用するために、FWD送信のベルハウジングはわずかに変更されている。
このエンジンは、左側バンク(FWDアプリケーション用フロントバンク)に1〜3〜5、右側バンクに2〜4〜6の番号が付いた気筒があります。終わり。発射順序は1-6-5-4-3-2です。
エンジンはミシガン州フリントのフリントノース工場で製造され、エンジンブロックとシリンダーヘッドはミシガン州サギノーのグレイアイアン工場(現在はGMサジノーメタルキャスティングオペレーションズ工場)で鋳造された。
これはビュイックの215立方メートルの(3.5 L)アルミニウムV8ファミリーの派生品であり、これもまた非常に長寿命の別のエンジンであるローバーV8(1960-2006)になりました。
Fireball V 6 edit
このファミリーの最初のエンジンは、1962年のモデル年ビュイックスペシャルのために1961年に導入されました。アメリカ車のV6。それはBuickの215立方インチ(3.5 L)アルミニウムV8から派生したので、それは向かい合ったシリンダーと120°離れて設定された3本のクランクピンだけを持っているクランクシャフトによるシリンダー間の90°バンクと不均一な発砲パターンを持っています多くのV8エンジンがそうであるように、クランクピンを共有する2、3-4と5-6)。不規則な発砲パターンはしばしば粗さとして知覚され、元アメリカンモーターズの幹部はそれを「穂軸よりも粗い」と表現した。
1977年、ビュイックはクランクシャフトを「スプリットピン」構成に再設計して「均等発射」バージョンを作成した。対向するシリンダに関連するクランクピンは互いに30°ずれていた。比較的小さなオフセットではフライングアームを組み込む必要はありませんでしたが、コネクティングロッドのビッグエンドがクランクピンベアリングジャーナルから外れるのを防ぐために、オフセットクランクピンの間に厚さ3 mmのフランジが組み込まれました。隣接するビッグエンドに干渉しています。厚さ3 mm(0.12インチ)のフランジにより、左側のシリンダ列(FWDアプリケーションの場合は前方バンク)のコネクティングロッドは、右側のバンクに対して3 mm(0.12インチ)前方に移動しますが、エンジンブロックは効果的です。変わったエンジンと比較して変わらずに残った。シリンダーの中心線がクランクピンベアリングジャーナル上で集中しなくなったため、コンロッドはピストンピンの端から1.5 mm(0.059インチ)ずれたビッグエンドで再設計されました。この構成のエンジンは「中心からずれたボアスペーシング」を有することが知られるようになった。
オフセンター設計は、1988年のLN3バージョンのエンジンまで、左側のシリンダーが右側のバンクに対して前方に移動するまで続きました。同じバンクのシリンダ間の実際のボアスペーシングは4.24インチ(108 mm)のままですが、LN3以降のエンジンでは「オンセンターボアスペーシング」を持つことが知られるようになりました。
198 編集
彼らの革新的なアルミニウム215 V 8の高い製造コストについて懸念しているBuick事業部は、同じ工具に基づくより安価な鋳鉄エンジンを開発しようとしました。彼らは、基本的に「215」から2シリンダーを引いたアーキテクチャである、変わった90°V 6のレイアウトに落ち着きました。初期の形状では、全体の変位量が198立方インチ(3.2 L)の場合、口径とストロークは3.625インチ×3.1875インチ(92.08 mm×80.96 mm)でした。アルミ製エンジンよりも約35ポンド(16 kg)重かったが、製造するのははるかに安価だった。 Fireball V6と呼ばれ、1962年のビュイックスペシャルで標準エンジンとなりました。その年の彼らのテストでは、Road&Track はBuickの「実用的な」新しいV6に感銘を受け、「ほとんどの点でアルミニウムV8とまったく同じように聞こえ、機能する」と述べた。
225 編集
ボアは3.75インチ(95.25 mm)、ストロークは3.4インチ(86.4 mm)に拡大し、変位は225立方インチ(3.7 mm)に増加しましたL)。エンジンはポピュラーな小型ブロックのビュイックV8に似ていたので – 現在は鋳鉄製のブロックと(4.9 L)の300立方フィートの排気量で、エンジンは同じツールで同じ工場で安く作られた。このエンジンは、1964年から1967年までBuickの中型のSpecialとSkylarkモデル、そして1964年と1965年にOldsmobileの中型のF-85 / Cutlassモデルで使用された。
1964 – 1965年モデルは1バレルのRochester MonoJetを搭載し、155馬力(116 kW)を出力しました。 1966年から1967年にかけて、1バレルは2バレルのロチェスター2GVに交換され、エンジンは5馬力で160馬力(119 kW)に向上しました。
シボレー部門が製造した従来の250立方インチ(4.1L)のインライン6エンジンに賛成して1967年モデル年の後にV6が落とされ、ツーリングはカイザージープに売られた。
Dauntless [ edit ]
1965年、Kaiser-Jeepは、Jeep CJでBuick 225の使用を開始しました。それは Dauntless V6 として知られており、エンジンの発砲パターンから生じる振動を減衰させるためにビュイックバージョンよりはるかに重いフライホイールを使用しました。エンジンの需要はV8sとマッスルカーの時代に着実に衰退していたので、ビュイックは1967年にカイザーにこのエンジンのためのツーリングを販売しました。 American Motors(AMC)がJeepを購入したとき、V6はAMC Straight-6エンジンに置き換えられましたが、V6ツーリングの所有権はAMCに残りました。
アプリケーション:
231 編集 1973年の石油危機により、GMは、ほとんどのゼネラルモーターズの車に搭載されていた350、400および454/455立方インチよりも経済的なエンジンを探すように求めた。その間のトラック。当時、GMが一般に提供していた唯一の「小型」エンジンは、シボレー部門によって開発されたもので、サブコンパクトなChevy Vegaで使用されている140立方インチ(2.3 L)OHCアルミニウムインライン4エンジンおよび250立方インチ(4.1 L)そのデザインのルーツが1962年のChevy II(Nova)までさかのぼるより小さなChevy、Buick、OldsmobileおよびPontiacモデルで使われるまっすぐな6気筒。
ビュイックのエンジニアが1つの素早いアイデアを試しました – 古いFireball V6を廃品置き場で拾い上げ、1974年のビュイックアポロに取り付けました。その解決策はとてもうまくいったので、GMはAMCがエンジンを生産に戻すことを望んだ。しかし、AMCの1口当たりの費用は高すぎると見なされました。完成したエンジンを買う代わりに、GMは1974年4月にAMCからツーリングと製造ラインを買い戻すという申し出をして、8月12日にエンジンを組み立て始めました。 1975年の特定モデルに陥る – ミシガン州フリントにあるBuickのエンジン組立工場では、古いV6機械の基礎がまだ無傷だったという事実によって可能になった動きなので、古い工具を元の位置に戻して少なくとも生産を始めるのは簡単だった新しいツーリングを作成するために必要だったであろう通常のスケジュールより2年早く。内径は、ビュイック350およびオールド307V8と同じ3.8インチ(97mm)に拡大され、231立方インチ(3.8L)の変位を生じた。 1975年にビュイックに78,349 231台設置された。[2]
新しい燃費および排出ガス基準の問題により、エンジンは110馬力(82 kW)しか発生しませんでした。
このエンジンは以下の車に使用された:
この記事は人間
運動制御は、神経系を持つ生物における運動の系統的な規制である。運動制御は、反射[1] および意欲に起因し得る運動機能を含む。研究分野としての運動制御は、主に心理学または神経学の下位分野です。
最近の運動制御の心理学理論は、運動技能の遂行に関与する筋肉や四肢を活性化し調整するために人間や動物が脳/認識を使用するプロセスとしてそれを提示しています。この複合的な心理学的観点から、運動制御は基本的に、世界と身体の現在の状態の両方に関する感覚情報の統合であり、適切な一連の筋力と関節の活性化を決定して望ましい運動や行動を生み出します。このプロセスは中枢神経系と筋骨格系との間の協調的な相互作用を必要とし、したがって情報処理、協調、力学、物理学、および認知の問題である[2][3] 成功した運動制御は決定的な決定ではなく世界との相互作用にとって極めて重要である。行動能力はあるが、バランスと安定性も同様に調整する。
運動の組織化と生成は複雑な問題であるため、運動制御の研究は、心理学、認知科学、バイオメカニクス、および神経科学を含む幅広い分野からアプローチされてきました。運動制御に関する現代の研究は学際的な分野となりつつあるが、研究の疑問は歴史的に、物理的または生物学的特性に焦点が当てられているかどうかに応じて、生理学的またはのいずれかとして定義されている。組織的および構造的規則[4]運動制御に関する研究分野は、運動協調、運動学習、信号処理、および知覚制御理論です。
感覚運動フィードバック編集]
刺激への応答編集]
感覚刺激を意識してそれを使用するプロセス行動に影響を与えるための情報は段階的に発生し、単純なタスクの反応時間はこれらの段階に関する情報を明らかにするために使用することができます。 反応時間は、刺激が提示されてから反応が終了するまでの期間です。 移動時間は、移動を完了するのにかかる時間です。
最初の反応時間実験のいくつかは、単純な反応課題と選択反応課題に対する反応時間の差を用いて刺激を処理し正しい反応を選択するのに必要な時間の長さを使ったFranciscus Dondersによって行われました。 ]このアプローチには最終的に欠陥がありますが、反応時間は刺激の識別とそれに続く応答の選択で構成され、それから正しい動作が実行されたという考えが生まれました。
さらなる研究により、これらの段階が存在するという証拠が提供されていますが、利用可能な選択肢の数が増えるにつれて反応時間の応答選択期間が長くなるという、Hickの法則として知られている関係です。 [ edit ]
人間の動きに対する閉ループシステムの古典的な定義は、Jack A Adams(1971)に由来します。[7] 閉ループシステムは、フィードバック、エラー検出、およびエラー訂正を重要な要素として持っています。システムに対する所望の値を特定する基準があり、そしてシステムの出力がフィードバックされてエラー検出のための基準と比較され、必要であれば補正される。参照から逸脱しています。」
日常の活動中に行われるほとんどの動きは、感覚情報にアクセスし、それを使用してより正確に動きを継続するという継続的なプロセスを使用して形成されます。このタイプの運動制御は、運動を制御するために感覚フィードバックに依存するので、フィードバック制御と呼ばれます。フィードバック制御は運動制御の位置づけられた形式であり、運動についての感覚情報および運動が実行される環境からの特定の感覚入力に依存する。この感覚入力は、処理されている間、必ずしも行動に対する意識的な認識を引き起こすわけではありません。 閉ループ制御[8] は、モーター制御のフィードバックベースのメカニズムで、環境に対する何らかの操作が、フィードバックを通じて将来のパフォーマンスに影響を与えるある種の変化を生み出します。閉ループモータ制御は、連続的に制御される動作に最も適していますが、弾道動作には十分に速くは機能しません。 [引用が必要] フィードバック制御は感覚情報に頼っているため、それは遅いです。感覚処理として。感覚処理が動きを制御するために使用されているので、動きが速く実行されるほど、それがより正確でなくなるので、これらの動きは速度/精度のトレードオフの影響を受ける。
開ループ制御 [ edit ]
Jack。Aによる古典的な定義。 Adamsは以下のとおりです。[9] 開ループシステムには、エラー調整のためのフィードバックやメカニズムはありません。システムへの入力イベントはその影響を及ぼし、システムはその入力への変換に影響を与え、システムは出力を持ちます……負荷が重いときには信号が固定され、トラフィックが停止するとフローが妨げられます。軽いです。システムには代償機能はありません。」
しかしながら、いくつかの動きは感覚情報を統合するには速すぎるので、代わりにフィードフォワード制御に頼らなければなりません。 開ループ制御は、モーター制御のフィードフォワード形式であり、感覚情報を処理できるようになる前に終了する急速な弾道運動を制御するために使用されます。この種の制御を最もよく研究するために、ほとんどの研究は、しばしば感覚神経が脊髄から切り離されている猫やサルを含む、求心路遮断研究に焦点を合わせています。腕から感覚情報をすべて失ったサルは、求心路遮断処置から回復した後、通常の行動を再開した。 [10] 開ループ制御はさまざまな病状に適応できるため、費用関数の支配を変えることでさまざまな運動障害のサインを抽出するために使用できることが示されています。調整[編集]
コアモーター制御の問題は、動きを生み出すためにモーターシステムのさまざまなコンポーネントを調整して動作することです。モーターシステムは非常に複雑で、さまざまな組織レベルの相互作用部分から構成されています
末梢神経細胞は中枢神経系からの入力を受けて筋肉を神経支配します。次に、筋肉は関節を動かす力を生み出します。部品を一緒に機能させることは、モータシステムにとって困難な問題であり、この問題がどのように解決されるかは、モータ制御研究において活発に研究されている分野です。
反射神経編集]
反射神経運動と呼ばれる固定神経筋経路からなる運動成分の協調が固定されている場合もあります。反射神経は、通常、自動および固定運動反応として特徴付けられ、知覚処理に依存する反応に対して可能なものよりもはるかに速い時間スケールで発生します[12] 反射神経は、運動系の安定化において基本的な役割を果たします。小さな摂動と固定実行パターンの維持のために。いくつかの反射ループは、脳からの入力を受け取らずに脊髄のみを通って送られるので、注意や意識的な管理を必要としません。他の人はより低い脳領域を含み、事前の指示や意図の影響を受ける可能性がありますが、それらは知覚処理やオンライン制御から独立しています。
最も単純な反射は、モノシナプス反射、またはモノシナプス伸張応答などの短ループ反射です。この例では、求心性ニューロンは筋肉の伸張によって変形すると筋肉紡錘体によって活性化されます。脊髄では、これらの求心性ニューロンは、同じ筋肉の収縮を調節するアルファ運動ニューロンに直接シナプスを形成します[13] したがって、筋肉の伸張は、中央制御なしで自動的にその筋肉の反射性収縮のシグナルを送ります。名前と説明が暗示するように、単シナプス反射は、求心性感覚ニューロンと遠心性運動ニューロンの間の単一のシナプス結合に依存している。一般に、単シナプス反射の作用は固定されており、意図または指示によって制御または影響を受けることはできません。しかし、これらの反射の獲得または大きさは状況や経験によって調整できることを示唆する証拠がいくつかあります。 [14]
多シナプス反射または長ループ反射は、脊髄内に複数のシナプス結合を含む反射弧です。これらのループは同様に脳の皮質領域を含むことがあり、したがってより長い移動時間のためにそれらの単シナプス対応物より遅い。しかし、多シナプス反射ループによって制御される行動は、知覚処理を必要とする行動よりもまだ速い(19659039)。短ループ反射の行動は固定されているが、多シナプス反射はしばしば命令または以前の経験によって調節され得る。長いループ反射の特徴は、幼児に見られる非対称の強直性の首の反射です。
シナジー [編集]
モーターシナジーは、(1)セット間でのタスクの共有を組織化するニューラル組織です。要素変数相乗効果の構成要素は、物理的に接続されている必要はなく、実行されている特定の運動課題についての知覚的情報へのそれらの応答によって接続されている。 。シナジーは、反射神経のように固定されているのではなく、学習されており、タスクに依存した方法で体系化されています。相乗効果は、特定のアクションに対して構成されており、一般にコンポーネント自体に対しては決定されません。 Nikolai Bernsteinは、プロの鍛冶屋のハンマーアクションで、相乗効果を発揮していることで有名です。ハンマーの動きを制御する腕の筋肉は、一方の筋肉の誤差および変動性が他方の筋肉の動作によって自動的に補償されるように情報的にリンクされている。これらの代償行為は、知覚処理が許すと思われるよりも速く起こるという点で反射的であるが、それでも初心者ではなく専門家の演奏にのみ存在する。鍛冶屋の場合、問題となっている相乗効果は特にハンマーアクションのために組織されており、腕の筋肉の一般的な目的の組織ではありません。相乗効果には、タスクに依存することに加えて、2つの明確な特徴があります。共有と柔軟性/安定性 [18]
「共有」は、特定の運動課題の実行が相乗効果を構成するすべての要素の複合的な行動に依存することを要求する。多くの場合、特定のタスクに厳密に必要とされるよりも多くのコンポーネントが関係しています(下記の「冗長性」を参照)が、それでもモータータスクの制御はすべてのコンポーネントに分散されます。単純なデモンストレーションは、2本の指で2つのフォースプレートを押し下げることによって参加者が一定量の力を生成することを要求される2本指の力生成タスクから来ています。独立した指の寄与を組み合わせる。任意の一本の指によって生み出される力は変化し得るが、この変化は他方の作用によって制限され、それによって所望の力が常に発生される。
共変動は、運動課題に「柔軟性と安定性」ももたらします。力の生成作業をもう一度考えてみると、片方の指が十分な力を生成しなかった場合は、もう一方の力で補うことができます。[19] 運動相乗作用の構成要素は他の構成要素の誤差と変動を補償するそれは運動課題の結果に影響を与える可能性があります。これにより、特定のタスクに対する複数のモーターソリューションが可能になるため柔軟性が得られ、個々のモーターコンポーネントのエラーがタスク自体に影響を与えるのを防ぐことでモーターの安定性が得られます。
相乗効果は運動制御の計算上の困難性を単純化する。運動系が非常に複雑であること、およびこの構成が発生する可能性があるレベル(神経、筋肉、運動学的、空間的など)が異なるため、身体の自由度を調整することは困難な問題です。相乗効果の構成要素は特定のタスクに機能的に結合されているので、単一の神経信号で関連する相乗効果を活性化することによって運動タスクの実行を達成することができる。成分の系統的な共変動の結果として自動的に。反射が物理的に接続されているために中枢神経系による個々の構成要素の制御を必要としないのと同様に、行動は機能的に接続されているので最小限の実行制御で相乗効果を通して実行できる。 [21] 感覚相乗作用は、環境入力の混合を統合して低次元の情報を中枢神経系に提供することで運動相乗作用の漸増を導く上で重要な役割を果たすと考えられている。
運動プログラム 編集
相乗効果は運動成分の周辺相互作用から派生した協調を表すが、運動プログラムは特定の、事前に構造化された運動活性化パターンである。 [4] それらは、相乗効果によって提供されるボトムアップアプローチではなく、運動協調へのトップダウンアプローチを表している。運動プログラムは開ループ方式で実行されますが、感覚情報はおそらく生物の現在の状態を感知して適切な目標を決定するために使用されます。しかし、いったんプログラムが実行されると、追加の官能情報によってそれをオンラインで変更することはできません。
運動プログラムの存在の証拠は、迅速な運動の実行とそれらが開始された後にそれらの運動を変えることに関連する困難性の研究から来る。例えば、速い腕の振りをするように頼まれる人々は、動きが始まった後に「停止」信号を与えられたときにその動きを止めることが極めて困難である[22] 。最初の "GO"シグナルが 前に実際に動きは始まります。この研究は、いったん運動プログラムの選択と実行が始まると、それは別の行動が取られることができる前に完了まで走らなければならないことを示唆する。この効果は、特定の運動プログラムによって実行されている動きが全く起こらないようにされた時でさえも見出された。特定の動作(腕を押すなど)を実行しようとしたが、実際には動作が発生する前に無意識のうちに自分の体の動作を停止させた人々は、同じ筋肉活性化パターンを示します。彼らが意図した行動を完了することを許されている時のような動き) [23]
運動プログラムの証拠は説得力があるように思われますが、この理論に対するいくつかの重要な批判がありました。 1つ目はストレージの問題です。有機体が生み出すことができるそれぞれの運動がそれ自身の運動プログラムを必要とするならば、その有機体がそのようなプログラムの無制限の貯蔵所を所有することが必要であるように思われる。そのような施設が取るであろう莫大なメモリ要件を除いて、脳内の運動プログラム記憶領域はまだ同定されていない。第二の問題は、動きの目新しさに関するものです。特定の運動プログラムが特定の運動のために必要とされるならば、それがどれほど新規な運動を生み出すであろうかは明らかではない。せいぜい、個人は何らかの成功を収めてそれを実行する前に何らかの新しい運動を練習しなければならず、最悪の場合、新しい運動のための運動プログラムは存在しないので、新しい運動をすることができないであろう。これらの困難は、一般化運動プログラムとして知られる運動プログラムのより微妙な概念をもたらしました[4] 一般化運動プログラムは、特定のクラスの行動のためのプログラムです。特定の動きこのプログラムは、環境の状況と生物の現在の状態によってパラメータ化されています。
冗長度 [編集]
運動系を調整するための重要な問題は、運動自由度の冗長度の問題です。 「相乗効果」の節で詳述したように、これらの行動を制御する機能的な相乗効果は行動の結果を変えることなく共変動することができるので、多くの行動および動きは複数の方法で実行することができる。これは、その動作に対する物理的制約によって一般的に要求されるよりも多くの運動構成要素がその動作の生成に関与するために可能である。たとえば、人間の腕には7つの関節があり、それが世界の手の位置を決定します。しかしながら、手を置くことができる任意の位置を特定するのに必要な空間的寸法は3つだけである。この運動学的自由度の超過は、手の任意の特定の位置に対応する複数のアーム構成があることを意味する。
運動冗長性の研究に関する最も初期のそして最も影響力のある研究のいくつかは、ロシアの生理学者Nikolai Bernsteinから来ました。 Bernsteinの研究は主に、技能のある行動のためにどのように調整が発達したかを理解することに関係していました。彼は、運動システムの冗長性が、同等の結果を達成しながら、多数の異なる方法で行動と運動を実行することを可能にしたことを観察した[20] 。運動と運動システムの調整はそれらの運動を実行するのに必要でした。それを可能にするニューロン、筋肉、および運動学の特定の調整は、任意の望ましい動きまたは動作にはありません。このモータ等価問題は、自由度問題として知られるようになりました。これは、モータシステムで利用可能な冗長自由度を持つことによる積であるためです。
運動制御における知覚 編集[8]
感覚情報の処理が運動や行動の制御にどのような影響を与えるかという問題とは異なるが関連している。世界の認識がどのように作用するのかという問題。知覚は運動制御において極めて重要である。なぜならそれは行動、運動を組織化し実行するのに使用される物体、環境および体についての関連情報を運ぶからである。何が認識されており、その後の情報がどのようにして運動系を組織化するのに使用されているかは、現在進行中の研究分野です。
モデルベースの制御戦略編集]
ほとんどのモデルベースの運動制御戦略は知覚情報に頼っていますが、この情報が必ずしも有用であるとは限らないと仮定されます。光学情報は瞬目によって中断され、動きは環境内の物体によって妨げられ、歪みは物体の形状の外観を変える可能性があります。モデルベースおよび表現型制御戦略は、知覚情報がない場合でも、行動を計画および実行するための主要な情報源として、知覚情報と事前知識の組み合わせから構築された、環境の正確な内部モデルに依存するものです。 ]推論と間接知覚 edit
知覚システムの多くのモデルは、間接知覚、または知覚される世界が実際の環境と同一ではないという概念を仮定しています。環境情報は知覚される前にいくつかの段階を経なければならず、そしてこれらの段階間の移行は曖昧さを導入する。実際に認識されるのは、以前の経験に基づいて、環境で何が起こっているのかについての心の最善の推測です。このアイデアのサポートは、部屋が歪んでいるために定まった大きさであることがわかっているオブジェクトが、部屋の周りを移動するにつれて拡大または縮小しているように見える、エイムスの部屋の錯覚に由来します。知覚者が遭遇した以前のすべての部屋がそれらの特性を持っていたので、部屋自体は正方形であるか、または少なくとも直角から成ると見られている。この曖昧さのもう一つの例は、特定の神経エネルギーの教義からきています。教義は、異なるタイプの感覚入力に対して異なるタイプの神経があり、これらの神経は刺激の方法に関係なく特有の方法で反応するという発見を提示しています。つまり、赤の色は、特定のパターンで視神経を発火させます。この特定のパターンは、赤の色を帯びるように脳によって処理されます。しかし、その同じ神経が同じパターンで電気的に刺激されると、対応する刺激が存在しないときに脳は赤色を知覚することができます。
順方向モデル 編集順方向モデルは、特定の運動プログラムと組み合わせた、利用可能な知覚情報を取り込む運動制御の予測内部モデルです。そして計画された運動の結果を予測しようとします。フォワードモデルは、運動成分の力、速度、および位置が環境および個人の変化にどのように影響するかを決定することによって作用を構造化します。個人が彼らの環境と相互作用するとき、フォワードモデルが四肢の硬さの神経制御を助けることが提案されている。フォワードモデルは、行動の結果を予測するための入力として運動プログラムを使用すると考えられています。フォワードモデルによって行われた予測が実際の動きの結果と一致しない場合、エラー信号が生成され、既存のモデルの更新を促し、学習のためのメカニズムを提供します。これらのモデルはなぜ自分自身をくすぐることが不可能であるかを説明します。それが予測不可能であるとき感覚はくすぐったいように経験されます。ただし、フォワードモデルは運動の結果を予測するため、運動は予測可能であり、したがってくすぐりはしません。 [25]
順方向モデルの証拠は運動適応の研究から来ています。人の目標指向の到達運動が力場によって混乱させられるとき、彼らは徐々に、しかし着実に、彼らが再び彼らの目標に到達することを可能にするために彼らの腕の運動を適応させる。しかし、彼らはいくつかの高レベルの動きの特徴を保存するような方法でそうします。ベル形の速度プロファイル、手の直線並進、および滑らかで連続的な動き[26] これらの動きの特徴は、驚くほど異なる腕の力学(すなわちトルクと力)が必要であるという事実にもかかわらず、回復されています。この回復は運動を動機づけているものが特定の運動計画であるという証拠を提供し、そして個人はフォワードモデルを使用して特定のタスクレベル特性を達成するために腕の運動が腕の運動をどのように変えるかを予測している。予想される腕の動きと観察される腕の動きとの間の差は、学習の基礎として使用されるエラー信号を生成する。フォワードモデルの追加の証拠は、被験者が視覚化されていない動きの後にエフェクタの位置を決定することを要求する実験から来る[27]
EDIT
望ましい知覚的結果を達成するために運動成分の必要な動きを予測する。彼らはまた運動の結果を取り、その状態をもたらした運動指令の順序を決定することを試みることができる。これらの種類のモデルは、開ループ制御に特に有用であり、頭が動いている間に静止物体に固定するなどの特定の種類の動きを可能にする。順モデルを補完し、逆モデルは適切な運動計画を生成するために特定の知覚的結果を達成する方法を推定しようとします。インバースモデルとフォワードモデルは非常に密接に関連しているため、内部モデルの研究は多くの場合、行動における両方のモデルタイプの役割の証拠として使用されます。
したがって、運動適応研究も逆モデルの場合を主張します。運動運動は、運動の特定の不変の特徴を保存する所定の「計画」に従うように思われる。上記の到達タスクでは、ベル型の速度プロファイルと滑らかで直線的な手の軌跡の持続性が、このような計画の存在の証拠となります[26] これらの望ましいタスクレベルの結果を達成する動きは、逆モデルによって推定されます。したがって、適応は、逆モデルを用いて必要な運動を推定し、それらの運動計画の結果をフォワードモデルを用いてシミュレートし、所望の結果と実際の結果との間の差を観察し、将来の試みのためにモデルを更新するプロセスとして進行する。
情報に基づく制御 [編集]
1235 1237 1239 1241 1243 1245 1247 1249 1251 1253 1255 1257 1259 1261 1263 1265 1267 1269 1271 1273 1275 1277 1279 1281 1283 1285 1287 1289 1291 1293 1295 1297 1299 1301 1303 1305 1307 1309 1311 1313 1315 1317 1319 1321 1323 1325 1327 1329 1331 1333 1335 1337 1339 1341 1343 1345 1347 1349 1351 1353 1355 1357 1359 1361 1363 1365 1367 1369 1371 1373 1375 1377 1379 1381 1383 1385 1387 1389 1391 1393 1395 1397 1399 1401 1403 1405 1407 1409 1411 1413 1415 1417 1419 1421 1423 1425 1427 1429 1431 1433 1435 1437 1439 1441 1443 1445 1447 1449 1451 1453 1455 1457 1459 1461 1463 1465 1467 1469 1471 1473 1475 1477 1479 1481 1483 1485 1487 1489 1491 1493 1495 1497 1499 1501 1503 1505 1507 1509 1511 1513 1515 1517 1519 1521 1523 1525 1527 1529 1531 1533 1535 1537 1539 1541 1543 1545 1547 1549 1551 1553 1555 1557 1559 1561 1563 1565 1567 1569 1571 1573 1575 1577 1579 1581 1583 1585 1587 1589 1591 1593 1595 1597 1599 1601 1603 1605 1607
1867年にフランスの0-6-0
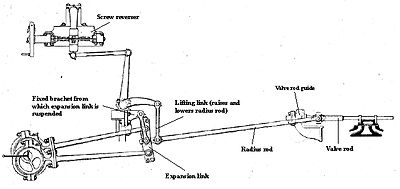
1867年にフランスの0-6-0号外気筒混合交通機関車(Midi 801)に適用されたように、スティーブンソンの内側の弁装置、1941年にスティーブンソンの機関車で働いていた2人の従業員Gabsを偏心棒の先端に両端で枢動させた縦の細長いリンクと取り替える簡単な手段を提案しました。方向を変えるために、リンクとロッドの端部は、それを逆転レバーに接続するリーチロッドによって作動される釣り合いのとれたベルクランクによって、体を動かして上げ下げされました。これは逆転を単純化するだけでなく、ギアを少しずつ上げ下げすることができ、したがって異なる割合での「前方」および「後方」偏心からの組み合わせ運動は弁へのより短い移動を与え、入場を遮断する。ストロークの早い段階で蒸気を発生させ、ボイラーからの吸引を継続するのではなく、自身のエネルギーを使用して、より少量の蒸気をシリンダー内で膨張的に使用します。エンジンを始動したり、通常は最大ストロークの約70-80%の最大カットオフでエンジンを始動させたり勾配を上昇させたりすることで、拡張作業の経済性と鉛の増加の効果から恩恵を受けるようになりました。各ストロークの終わりに高い圧縮。このプロセスは一般に「リンクアップ」または「ノッチアップ」として知られていました。後者は、レバーのノッチと係合するキャッチによって反転レバーを正確な位置に保持できるためです。象限に。この用語は、スクリューリバーサーの導入後も固執していました。他のほとんどのタイプには見られないスティーブンソンギアのさらなる本質的な利点は、さまざまなリードでした。ギアのレイアウトによっては、フルギアで低速で作業しているときに、各ピストンストロークの終わりに圧縮および背圧を大幅に下げることができました。運動量が増加してカットオフが短くなると、もう一度進み、リードが自動的に進み圧縮が増加し、各ストロークの終わりにピストンを緩衝し、入ってくる流入蒸気の新鮮なチャージの温度低下を回避するために残りの捕捉蒸気を加熱した。
アメリカの機関車は、1900年頃までフレームの間に配置されていたスティーブンソン製の弁装置の内側に普遍的に採用され、すぐにウォルシャートの外の動きに転向した。ヨーロッパでは、Stephensonのギアは駆動輪の外側に配置され、偏心輪またはリターンクランクのいずれかによって駆動されるか、あるいは英国の場合のように車軸から偏心輪を介して駆動されるフレーム間に配置される。
アプリケーション [編集]
Abner Doble [4] はスティーブンソン製の弁装置を検討しました。 "(...)すべての中で最も適した弁装置です。それは非常に単純な動弁装置であり、それでも非常に正確であることができます、しかしその大きな利点はその支持点間の正確な関係のためにその正確さが自己完結的であるということです。シャフト、バルブクロスヘッド、およびリンクハンガーアームの偏心は、バルブの動きにはほとんど影響を与えませんが、すべてのシリンダーが1つの平面内にあるエンジンでの使用は、作家の考えでは、最良の選択です。 「システムに固有のスティーブンソン製ギアのもう1つの利点は可変リードです。通常はフルギアでゼロになり、カットオフが短くなるにつれて増加します。結果として生じるスティーブンソンギアの1つの欠点は、非常に短いカットオフが使用されるときにストロークの終わりに過剰圧縮する傾向があり、したがって最小カットオフがウォルシャートギアを有する機関車のように低くなることができないことである。 。より長い偏心ロッドとより短いリンクはこの影響を減らす。
Stephenson動弁装置は、後退を必要とするあらゆるエンジンにとって便利な配置であり、鉄道機関車、牽引エンジン、蒸気自動車エンジン、および転動ミルエンジンのような後退を必要とする定置エンジンに広く適用された。圧倒的多数の船舶用エンジンに使用されていました。後の4気筒エンジンがWalschaertsギアの内部で使用したが、Great Western Railwayはその機関車のほとんどにStephensonギアを使用しました。
ギアの詳細は、主に拡張リンクの配置において異なります。初期の機関車の慣習では、偏心ロッドの端部はリンクの端部で枢動されたが、船舶用エンジンでは、偏心ロッドの枢動軸はリンクスロットの後ろ(または垂直エンジンでは下方)に設定された。これらはそれぞれ「機関車リンク」と「発射リンク」として知られるようになりました。発射リンクは、フルギアでピストンロッドへのより直接的な直線駆動を可能にし、所与の移動に必要とされる偏心のサイズを減少させることによって所与の空間内でのより長いバルブ移動を可能にするので機関車タイプに取って代わった。発射式リンクは、1850年代からアメリカの機関車にはかなり普遍的でしたが、ヨーロッパでは、1846年には早くも発生しましたが、1900年頃まで普及することはありませんでした。それはより大きな磨耗面を持ちそして打ち上げリンクに固有の幾何学的妥協を最小にすることによってバルブの出来事を改善した。
イギリスでは、スティーブンソン製の動弁装置を搭載した機関車は、通常これを機関車のフレームの間に取り付けていました。 1947年、ロンドン、ミッドランド、スコットランドの鉄道は、スタニエクラス5の4-6-0機関車を製造しました。そのほとんどは、このクラスでは普通のヴァルシャートの動弁装置でしたが、そのうちの1つはありませんでした。 4767は、スティーブンソン製の動弁装置をホイールとフレームの外側に取り付けました。偏心の代わりに、ダブルリターンクランクを使用して偏心ロッドを駆動し、打ち上げタイプの拡張リンクを使用しました。これは£13,278で、Walschaertsのバルブ装置と同時に製造されたものよりも約600ポンド高かった。実験の目的は、(Walschaertsの運動の一定の進みとは対照的に)可変の進みを有するバルブギアが性能に影響を及ぼすかどうかを見出すことであった。通常のサービスでは銀行で優れたパフォーマーとしての評判を得ましたが、裁判では利点がないことが証明されました[5][6][7][8][9]
edit ]
ハーモニックバルブとして、スティーブンソンの配置が最適であると考えられるかもしれません。それにもかかわらず、リンクを逆にするために身体的に変位させる必要があるという事実は、かなりの垂直方向のクリアランスを必要とすることを意味した。その導入時には、機関車の世界では重心、したがってボイラー中心線をできるだけ低く保つことが重要であると考えられていました。イギリスの動弁装置は一般的にボイラーの下のフレーム間に配置されていたので、非常に窮屈な条件のため動弁装置は修理のためにアクセスできなくなりました。リンクの重さと偏心ロッドの端を持ち上げる必要があるため、逆転も激しい作業になる可能性があります。これらの問題に対処するために、2つの主な変種が開発されました。
グーチバルブギヤ[19659187]編集]
1878年にフランスの2-4-0外側シリンダ式機関車(ミディナンバー51)に適用されたグーチ外側バルブギヤ
Goochバルブ装置(1843年にDaniel Goochによって発明された)において、逆転および遮断機能は、バルブロッドを固定点を中心に旋回する「静止」リンクに接続するラジアスロッドを上下させることによって達成された。後退レバーはラジアスロッドの重量を持ち上げるためだけに必要だったので、求められる利点はギアの高さの減少とより軽い動作でした。これは、リンクが凹状ではなく凸状(偏心に対して)であることを意味します。 Goochバルブギアは、フルギアでバルブスピンドルと偏心ロッドの間に角度があるという欠点がありましたが、Stephensonギアの最良の形態では、推力は直線的でした。 Goochギアはどんなカットオフでも常にリードしていました。 GoochまたはStephensonのギアを装備した同様の機関車を使用中に比較した場合、これは不利であることが観察されました。[10] Goochギアは、1860年代までの1、2人のエンジニアを除いて英国では決して普及しませんでしたが、フランスではかなり一般的でした。
レッドウィング、
レッドウィング、 RedwingとRed Wing TerraceはどちらもBuckland No. 491の産地です。[1] Red Wing TerraceはGreen Acres on Greenの北に位置します。 Acres RoadとRed Wing Terrace Roadの南、White Star地域の南。 White StarはWhite Star Roadにあり、Township Road 502とSaskatchewan Highway 780と並行しています。
レッドウィングはプリンスアルバートのシティリミットの北3 km(1.9マイル)、市内中心部の北6 km(3.7マイル)です。レッドウィングはスプルースホームから南に18キロです。 Red Wing RoadはSaskatchewan Highway 2と交差するTownship Road 494と並行して走っています。[2] しばらくの間、Nesbit Forest郵便局は、ノースウェスト1/4セクション8、タウンシップ49、レンジ26、ウェストの土地の説明にあります。 2番目の子午線の、は、レッドウィングに最も近い郵便の場所でした。プリンスアルバートは、第2子午線の西、レンジ26、タウンシップ48のすぐ近くに位置しています。
教育 [編集]
歴史教育編集]
1912年、ワンルーム校舎、RED WING Schoolと名付けられました。サスカチュワン州公文書館レジーナ支店によると、地区#2857は、南東部32郷49丁目26番地、2経線の西で形成されました。この場所はプリンスアルバートの街のちょうど北西にあります。本バックランドの遺産によれば、マーガレット・ウィリスが最初の教師だった[3]
[19659000] 編集]
レッドウィングには小学校がありますサスカチュワンリバースクール課の。サスカチュワン州のレッドウィングローマカトリック教区別学校課No.136は1999年5月6日に設立されました。 edit
PAREDAを介してレッドウィングに工業団地が開発されました。プリンスアルバート地域経済開発局。 [ edit ]
- Lat(DMS) 53°15'24″ N
- Long(DMS) ] 105°45'32″ W
- Dominion Land Survey セクション32タウンシップ49の範囲26第2子午線の西側
- UTC-6
|
レッドウィングに隣接する場所、 Saskatchewan |
|||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
|
|||||||||||
ダコタスー族のインディアン保護区のためにWahpatonかWahpetonのいずれかが綴られている。レッドウィングは、彼らの指導的地位の象徴として白鳥の羽毛が赤く染まったワーペルトンの首長の伝統的な名前である[9]
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164
ワードシンク
ワードシンクは、CDプレーヤー、オーディオI / Oカードなどのハイエンドプロフェッショナルデバイス間でデジタルオーディオ信号を同期させるための技術です。信号パス内のすべてのコンポーネントがデータを処理し、同期を維持できます。お互いに。
簡単に言えば、1人のドラマーがパターン10110を打ち負かすのは素晴らしいことですが、2人または3人のドラマーが同じ10110パターンを打ち負かしたとしても、すべてが同じ時点で始まるとは限らない。それをしていると、結果は同時に3つすべてを聴く必要があるかもしれない他の装置(例えばコンピュータのデジタルオーディオキャプチャカードまたは他のマルチトラック記録装置)にとって非常に濁ったメッセージです。
Robert Axelrod
Robert Axelrod (1949年5月29日生まれ。 Axel Roberts 、 Myron Mensah とも称されています)はアメリカの俳優です。デジモンを含むテレビ番組の音声、1980年にアニメの英語版のために声楽演技を開始した。[2][3] 彼の最も有名な役割のうちの2つはの主な敵対者であった。 ] Mighty Morphinパワーレンジャー、Finster、オリジナルの Mighty Morphinパワーレンジャーのモンスターメーカー。彼はまた、ポール・マッカートニーに似た人気のあるコメディ映画についても描いており、最近では、コメディーのデュオ、ティム&エリックのいくつかの作品にも登場しています 。 アニメ [編集]
アニメーション [編集]
